
Planar Mapping and Tracking
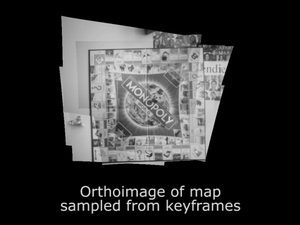
 Orthoimage of a planar indoor scene created in real-time on the mobile phone.
Orthoimage of a planar indoor scene created in real-time on the mobile phone.
Summary
We propose a homography-based mapping and tracking approach that assumes the scene is composed of a single plane only. Our system is primarily intended for indoor use where we can find planes e.g. on tables and walls. To reconstruct the planar environment we adopt an efficient planar image rectification algorithm.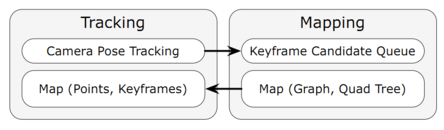 Our system is composed of tightly coupled tracking and mapping components similar to PTAM. The tracking component processes the image stream of a calibrated monocular camera, computes 6DOF camera poses and selects keyframes which are passed to the mapping component.
Our system is composed of tightly coupled tracking and mapping components similar to PTAM. The tracking component processes the image stream of a calibrated monocular camera, computes 6DOF camera poses and selects keyframes which are passed to the mapping component.
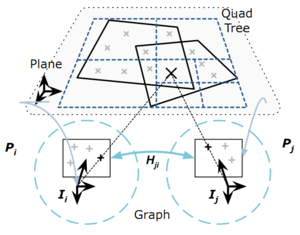 The mapping component establishes a persistent map representation which is continuously extended and refined as new views of the planar scene become available. Between keyframes we compute plane-induced homographies and organize these relations in a dedicated pose graph. Maps are composed of 3D points which sample the planar surface.
The mapping component establishes a persistent map representation which is continuously extended and refined as new views of the planar scene become available. Between keyframes we compute plane-induced homographies and organize these relations in a dedicated pose graph. Maps are composed of 3D points which sample the planar surface.
Video
 ISMAR submission video (30 MB)
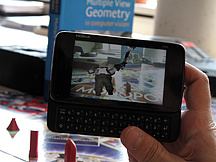
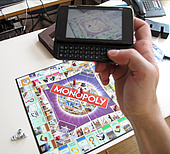
ISMAR submission video (30 MB) The video shows the system running on a Nokia N900 and mapping a table-sized indoor scene.
Publication
Christian Pirchheim, Gerhard ReitmayrHomography-Based Planar Mapping and Tracking for Mobile Phones
IEEE International Symposium on Mixed and Augmented Reality, 2011.