
Urban 3D Reconstruction
 In this project, we proposed methods for urban 3D reconstruction, which generate visually appealing (i.e., building models having planar surfaces and sharp edges, surroundings reconstructed as smooth surface) and compact reconstructions from urban environments using images acquired by Micro Aerial Vehicles (MAVs) as input. [more]
In this project, we proposed methods for urban 3D reconstruction, which generate visually appealing (i.e., building models having planar surfaces and sharp edges, surroundings reconstructed as smooth surface) and compact reconstructions from urban environments using images acquired by Micro Aerial Vehicles (MAVs) as input. [more]
Scalable Multi-Scale Surface Reconstruction
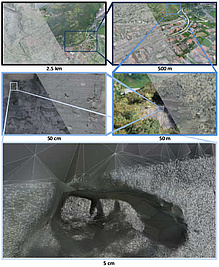 In this paper we present a scalable approach for robustly computing a 3D surface mesh from multi-scale multi-view stereo point clouds that can handle extreme jumps of point density (in our experiments three orders of magnitude). The backbone of our approach is a combination of octree data partitioning, local Delaunay tetrahedralization and graph cut optimization. Graph cut optimization is used twice, once to extract surface hypotheses from local Delaunay tetrahedralizations and once to merge overlapping surface hypotheses even when the local tetrahedralizations do not share the same topology. This formulation allows us to obtain a constant memory consumption per sub-problem while at the same time retaining the density independent interpolation properties of the Delaunay-based optimization. On multiple public datasets, we demonstrate that our approach is highly competitive with the state-of-the-art in terms of accuracy, completeness and outlier resilience. Further, we demonstrate the multi-scale potential of our approach by processing a newly recorded dataset with 2 billion points and a point density variation of more than four orders of magnitude - requiring less than 9GB of RAM per process. [more]
In this paper we present a scalable approach for robustly computing a 3D surface mesh from multi-scale multi-view stereo point clouds that can handle extreme jumps of point density (in our experiments three orders of magnitude). The backbone of our approach is a combination of octree data partitioning, local Delaunay tetrahedralization and graph cut optimization. Graph cut optimization is used twice, once to extract surface hypotheses from local Delaunay tetrahedralizations and once to merge overlapping surface hypotheses even when the local tetrahedralizations do not share the same topology. This formulation allows us to obtain a constant memory consumption per sub-problem while at the same time retaining the density independent interpolation properties of the Delaunay-based optimization. On multiple public datasets, we demonstrate that our approach is highly competitive with the state-of-the-art in terms of accuracy, completeness and outlier resilience. Further, we demonstrate the multi-scale potential of our approach by processing a newly recorded dataset with 2 billion points and a point density variation of more than four orders of magnitude - requiring less than 9GB of RAM per process. [more]
Robust Edge-based Visual Odometry (REVO)
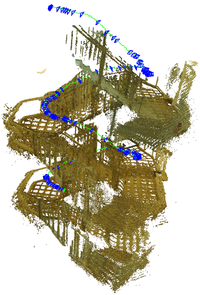 | In this work, we present a robust edge-based visual odometry (REVO) system for RGBD sensors. Edges are more stable under varying lighting conditions than raw intensity values, which leads to higher accuracy and robustness in scenes, where feature- or photoconsistency-based approaches often fail. The results show that our method performs best in terms of trajectory accuracy for most of the sequences indicating that edges are suitable for a multitude of scenes. Our system runs in real-time on the CPU of a laptop computer. [more] |
Direct Visual Odometry
 In this project, we develop a direct visual odometry method which mainly uses lines and therefore shows good performance in poorly textured environments (e.g., indoor scenes). In addition to the image information, we use IMU information to speed up the line detection step. However, also point features can be used where no lines are available. [more]
In this project, we develop a direct visual odometry method which mainly uses lines and therefore shows good performance in poorly textured environments (e.g., indoor scenes). In addition to the image information, we use IMU information to speed up the line detection step. However, also point features can be used where no lines are available. [more]
Search and Rescue Drones

EVELOC EU-Project (2024-2027)
The EVELOC project will investigate techniques for visual localisation using event cameras. The project aims at developing new algorithms for visual localisation within a known, mapped area which will be used as components for autonomously operating drones. [More]
RESIST EU-Project (2018-2021)
RESIST addresses extreme events on critical structures, implemented in the case of bridges and tunnels attacked by all types of extreme physical, natural and man-made incidents (e.g. earthquakes). [More]
SLIM EU-Project (2016-2020)

SLIM aims to develop a cost-effective and sustainable selective low impact mining solution based on non-linear rock mass fragmentation by blasting models, airborne particulate matter, vibration affections and nitrate leaching mitigation actions for exploitation of small mineral deposits (including those with chemically complex ore-forming phases) through a new generation of explosives and an advanced automatic blast design software based on improved rock mass characterisation and fragmentation models for optimum fragmentation and minimum rock damage and far-field vibrations. [More]
Walkassist

The Walkassist is a smart shoe developed to detect obstacles for visually impaired people using ultrasonic distance sensors. The aim of this research-project is to exploit additional visual information to support the ultrasonic based system. [More]
CSISmartScan
3D crime site scanning and documentation based on cost-efficient 3D sensors, tablets and smartphones.
 CSISmartScan3D will explore the possibilities and limitations for using modern sensor technologies with regard to requirements in the context of crime scene documentation, notably whether and to which extent adequate and complete 3D models can be captured. In the range of core methods, the potential of inter-modal sensor fusion will be of particular interest. [More]
CSISmartScan3D will explore the possibilities and limitations for using modern sensor technologies with regard to requirements in the context of crime scene documentation, notably whether and to which extent adequate and complete 3D models can be captured. In the range of core methods, the potential of inter-modal sensor fusion will be of particular interest. [More]
DigEx KIRAS Project (2018-2019)
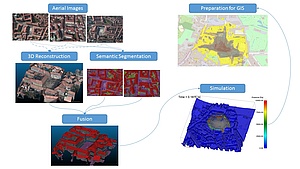
Simulation of the Threat Level and Potential of Damage of Explosive Devices in Urban Environments
Precise models of the impact of explosions in urban environments provide novel and valuable information in disaster management for developing precautionary, preventive and mitigating measures. In this project, we develop methods enabling accurate predictions of the process and effect of detonations at particular locations in urban environments. [More]
V-MAV (2014-2017)
Cooperative micro aerial vehicles using onboard visual sensors

The overall goal of the FWF-funded VMAV project is to advance the capabilities of small scale flying robots (UAV's) in the areas of flight behavior and flight autonomy. New algorithms will be investigated to make UAV's smarter, more agile and ultimately more useful for applications. [More]
FreeLine (2014-2016)
Overhead Power Line Clearance Inspection using an Unmanned Aerial Vehicle
3D Pitoti EU-Project (2013-2016)
 The aim of this project is to devise a coarse-to-fine 3D reconstruction and visualization pipeline to preserve the UNESCO World Heritage site in the Valcamonica Valley, Italy, and to provide access to the enriched high resolution digital rock-art for scientists, museum visitors, school children and web users. More information can be found here.
The aim of this project is to devise a coarse-to-fine 3D reconstruction and visualization pipeline to preserve the UNESCO World Heritage site in the Valcamonica Valley, Italy, and to provide access to the enriched high resolution digital rock-art for scientists, museum visitors, school children and web users. More information can be found here.
UAV-Vermessung FFG/BRIDGE-Project (2013-2016)

 Vermessungstechnische Anwendungen einer Sonderform der Photogrammetrie unter Verwendung von UAV (unmanned aerial vehicle) nehmen in ihrer Verbreitung und Bedeutung in der Vermessungskunde rasch zu. Ist einerseits die Genauigkeit der klassischen Photogrammetrie hinlänglich untersucht, so gibt es zu den neuen, UAV gestützten Anwendungen keine, auf grundlegenden wissenschaftlichen Untersuchungen basierenden Aussagen dazu, welche Parameter und in welchem Ausmaß für die Genauigkeit verantwortlich zeichnen. [More]
Vermessungstechnische Anwendungen einer Sonderform der Photogrammetrie unter Verwendung von UAV (unmanned aerial vehicle) nehmen in ihrer Verbreitung und Bedeutung in der Vermessungskunde rasch zu. Ist einerseits die Genauigkeit der klassischen Photogrammetrie hinlänglich untersucht, so gibt es zu den neuen, UAV gestützten Anwendungen keine, auf grundlegenden wissenschaftlichen Untersuchungen basierenden Aussagen dazu, welche Parameter und in welchem Ausmaß für die Genauigkeit verantwortlich zeichnen. [More]
AIRPLAN FFG/KIRAS-Project (2013-2015)
 Goal of the project is the spatial validation and securing of events in public space. We allow the validation and simulation of relevant spatial security and safety aspects on the basis of aerial imaging information. This enables, for the first time, a large-scale and resource efficient planning before the event to reduce the probability of a crisis, and quick simulation and reaction in case of emergency. [More]
Goal of the project is the spatial validation and securing of events in public space. We allow the validation and simulation of relevant spatial security and safety aspects on the basis of aerial imaging information. This enables, for the first time, a large-scale and resource efficient planning before the event to reduce the probability of a crisis, and quick simulation and reaction in case of emergency. [More]
HOLISTIC FFG/FIT-IT-Project (2011-2013)
 The aim of this research project is holistic scene understanding in large aerial datasets, consisting of thousands of massively redundant high-resolution images. Holistic scene understanding is one of the major problems in computer vision and photogrammetry and has recently got a lot of attention. [More]
The aim of this research project is holistic scene understanding in large aerial datasets, consisting of thousands of massively redundant high-resolution images. Holistic scene understanding is one of the major problems in computer vision and photogrammetry and has recently got a lot of attention. [More]