
Handling Pure Camera Rotation In Keyframe-Based SLAM
 Rotation-only camera movements are handled by tracking and mapping local panorama maps registered within a global 3D map. The information contained in the panorama maps is also used for 3D reconstruction.
Rotation-only camera movements are handled by tracking and mapping local panorama maps registered within a global 3D map. The information contained in the panorama maps is also used for 3D reconstruction.
Summary
Handling degenerate rotation-only camera motion is a challenge for keyframe-based simultaneous localization and mapping with six degrees of freedom. Existing systems usually filter corresponding keyframe candidates, resulting in mapping starvation and tracking failure. We propose to employ these otherwise discarded keyframes to build up local panorama maps registered in the 3D map. Thus, the system is able to maintain tracking during rotational camera motions. Additionally, we seek to actively associate panoramic and 3D map data for improved 3D mapping through the triangulation of more new 3D map features.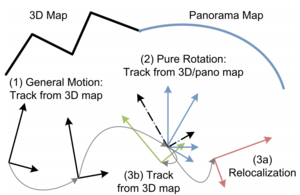
Figure: After initialization, the system starts to operate in full 6DOF mapping mode (1). If pure rotation motion is detected, the system switches to 3DOF mapping mode and creates a new panorama map (2). 6DOF measurements move the system back to full 6DOF operation (3b). In case of tracking failure, relocalization always recovers a full 6DOF pose (3a).
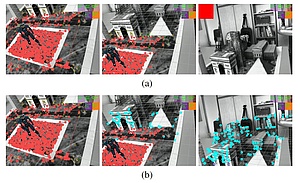
Figure: The same three non-consecutive frames as processed by (a) 6DOF SLAM and (b) hybrid SLAM (our approach). 6DOF SLAM discards low-parallax candidate keyframes, resulting in tracking failure due a lack of new finite map features (rendered in red). Hybrid SLAM detects the pure-rotation camera motion, creates a local panorama map, and continues camera tracking from infinite map features (rendered in cyan).

Figure: Hybrid SLAM handling a pure-rotation camera movement in real-time on the mobile phone.

Figure: Panoramas generated from keyframes of two local panorama maps.
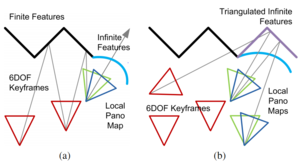
Figure: Relationships in our hybrid map representation between keyframes and features depicted in two stages. In stage (a) 6DOF keyframes observe finite map features. Local panorama maps are registered in the 3D map via reference panorama keyframes (green) that have finite and infinite feature observations, while the remaining dependent panorama keyframes (dark blue) observe infinite features only. In stage (b) infinite features are triangulated from corresponding observations matched between additional 6DOF keyframes and/or localized panorama keyframes from different local panorama maps. Note that the additional features enable the localization of further dependent panorama keyframes.
Video

Publication
Christian Pirchheim, Dieter Schmalstieg, Gerhard ReitmayrHandling Pure Camera Rotation in Keyframe-Based SLAM
To appear in: IEEE International Symposium on Mixed and Augmented Reality, 2013.