
 In this paper we present a scalable approach for robustly computing a 3D surface mesh from multi-scale multi-view stereo point clouds that can handle extreme jumps of point density (in our experiments three orders of magnitude). The backbone of our approach is a combination of octree data partitioning, local Delaunay tetrahedralization and graph cut optimization. Graph cut optimization is used twice, once to extract surface hypotheses from local Delaunay tetrahedralizations and once to merge overlapping surface hypotheses even when the local tetrahedralizations do not share the same topology. This formulation allows us to obtain a constant memory consumption per sub-problem while at the same time retaining the density independent interpolation properties of the Delaunay-based optimization. On multiple public datasets, we demonstrate that our approach is highly competitive with the state-of-the-art in terms of accuracy, completeness and outlier resilience. Further, we demonstrate the multi-scale potential of our approach by processing a newly recorded dataset with 2 billion points and a point density variation of more than four orders of magnitude - requiring less than 9GB of RAM per process.
ArXiv Preprint including supplementary
Supplementary Technical Report:
In this paper we present a scalable approach for robustly computing a 3D surface mesh from multi-scale multi-view stereo point clouds that can handle extreme jumps of point density (in our experiments three orders of magnitude). The backbone of our approach is a combination of octree data partitioning, local Delaunay tetrahedralization and graph cut optimization. Graph cut optimization is used twice, once to extract surface hypotheses from local Delaunay tetrahedralizations and once to merge overlapping surface hypotheses even when the local tetrahedralizations do not share the same topology. This formulation allows us to obtain a constant memory consumption per sub-problem while at the same time retaining the density independent interpolation properties of the Delaunay-based optimization. On multiple public datasets, we demonstrate that our approach is highly competitive with the state-of-the-art in terms of accuracy, completeness and outlier resilience. Further, we demonstrate the multi-scale potential of our approach by processing a newly recorded dataset with 2 billion points and a point density variation of more than four orders of magnitude - requiring less than 9GB of RAM per process.
ArXiv Preprint including supplementary
Supplementary Technical Report:Christian Mostegel and Markus Rumpler. Robust Surface Reconstruction from Noisy Point Clouds using Graph Cuts. Graz University of Technology, Institute of Computer Graphics and Vision, June, 2012. [bibtex] Cleaned Ground Truth for scene 25 of the DTU dataset. Valley Dataset
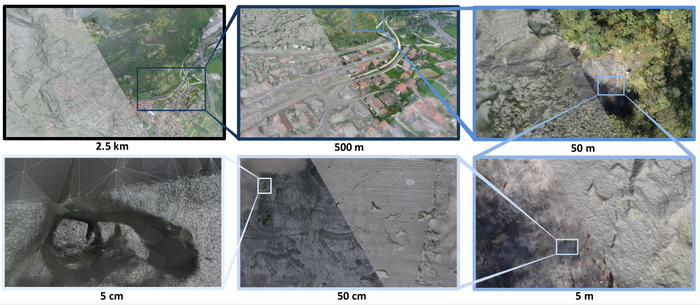
The valley set shows a prehistorical rock art site close to Capo di Ponte, Italy. It consists of four scale levels and approximately 2 billion points with a ground sampling distance ranging from 1m down to 50μm. For obtaining the dataset, please fill out the Terms of Use Form and attach it to an email with subject "Valley Dataset Request" to aerial ( at ) icg ( dot ) tugraz ( dot ) at.
If you use the dataset in a publication please cite us: 1) Christian Mostegel, Rudolf Prettenthaler, Friedrich Fraundorfer and Horst Bischof. Scalable Surface Reconstruction from Point Clouds with Extreme Scale and Density Diversity. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. [bibtex] 2) Thomas Höll and Axel Pinz, Cultural Heritage Acquisition: Geometry-Based Radiometry in the Wild. International Conference on 3D Vision (3DV), 2015. [bibtex] 3) Christian Mostegel, Markus Rumpler, Friedrich Fraundorfer and Horst Bischof. UAV-based Autonomous Image Acquisition with Multi-View Stereo Quality Assurance by Confidence Prediction. IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2016. [bibtex]