
Open Student Opportunity/Masters Thesis: Automatisiertes Laden von Elektro- und Plug-In-Hybridfahrzeugen
 | Mit der Zunahme an Elektrofahrzeugen wächst die Nachfrage an kundenfreundlichen und innovativen Lösungen für die Ladeinfrastruktur. Somit sind auch automatisierte Ladesysteme für Elektro- und Plug-In-Hybridfahrzeuge ein neues und zunehmend diskutiertes Thema in der Fahrzeugindustrie. |
Im Zuge der Diplomarbeit sollten verschiedene Fahrzeugtypen automatisiert erkannt und mit einem Robotersystem „betankt“ werden. Die Arbeitsinhalte der Diplomarbeit erstrecken sich über die maschinelle Fahrzeugerkennung sowie die Robotersteuerung. Wesentliches Ziel der Arbeit ist die Entwicklung und der Aufbau eines Ladestation-Demonstrators mit autonom-parkenden Fahrzeugen mit den Kooperationspartnern.
Dauer: ca. 6 Monate Beginn: ab sofort Arbeitsplatz: Institut für Maschinelles Sehen und Darstellen, Institut für Fahrzeugtechnik Kontakt: Matthias Rüther <ruether (at) icg.tugraz.at> | |
Open Student Opportunity/Masters Thesis: LiDAR Point Cloud Tooling supporting Metrology
LiDAR (Light Detection and Ranging) is an innovative depth sensing technology which measures the time difference of emitted and received light signals. Figure 1 depicts the basic working principle of such a MEMS-based system: a MEMS mirror is used to deflect the emitted laser pulses. Photodiodes detect the reflected light. The light’s time-of-flight is determined with time-to-digital converters. Finally, post processing units provide point cloud information of the scenery (see also Figure 2) which is then be employed by use-case applications (e.g., assisted/automated driving applications).
In order to evaluate the performance of a sensor system, metrology tools are used. The aim of this diploma thesis is to develop a tool that supports basic metrology tasks (such as visualization of point cloud data, measurements within the point cloud, field-of-view analyses) for a MEMS-based LiDAR system. Furthermore, algorithms should be explored in order to perform a raw-to-point cloud conversion (used by the metrology tool) in an efficient and high performing way.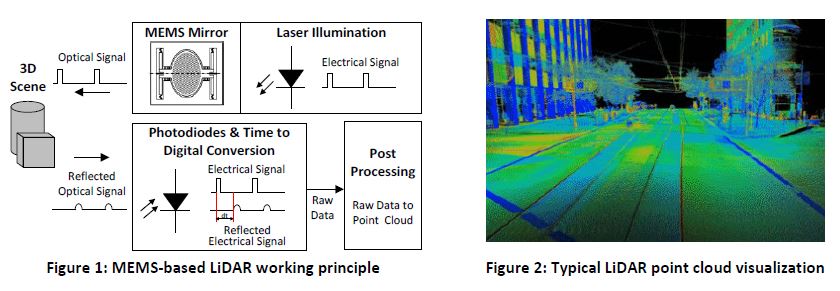 Infineon Technologies Austria and Graz University of Technology offer a paid diploma thesis in this
Infineon Technologies Austria and Graz University of Technology offer a paid diploma thesis in this
innovative field of research:
looking forward to hear from you! Dipl.-Ing. Dr.techn. Matthias Rüther
Institute of Computer Graphics and Vision
Graz University of Technology
Tel.: +43 (316) 873 5045
Email: ruether@icg.tu-graz.ac.at
In order to evaluate the performance of a sensor system, metrology tools are used. The aim of this diploma thesis is to develop a tool that supports basic metrology tasks (such as visualization of point cloud data, measurements within the point cloud, field-of-view analyses) for a MEMS-based LiDAR system. Furthermore, algorithms should be explored in order to perform a raw-to-point cloud conversion (used by the metrology tool) in an efficient and high performing way.
Infineon Technologies Austria and Graz University of Technology offer a paid diploma thesis in thisinnovative field of research:
- Development of a point cloud visualization tool enabling basic LiDAR-metrology tasks
- Analysis of a LiDAR sensor system by means of the developed LiDAR-metrology tool
- Evaluations of high-performance algorithms for raw-to-point cloud transformations
- Focus:
- C/C++, OpenGL
- Interest in GPU programming and embedded systems
looking forward to hear from you! Dipl.-Ing. Dr.techn. Matthias Rüther
Institute of Computer Graphics and Vision
Graz University of Technology
Tel.: +43 (316) 873 5045
Email: ruether@icg.tu-graz.ac.at
Robot Vision
Youtube Channel
News
2016/12/16: New Open Student Position: LIDAR Metrology Tooling
--> Learn More2016/12/01: New Open Student Position: Robotic Charging of Electric Vehicles
--> Learn More2016/07/15: Accepted to BMVC 2016
Our paper "A Deep Primal-Dual Network for Guided Depth Super-Resolution" has been accepted for oral presentation at the British Machine Vision Conference 2016 held at the University of York, United Kingdom.
2016/07/11: Accepted to ECCV 2016
Our paper "ATGV-Net: Accurate Depth Superresolution" has been accepted at the European Conference on Computer Vision 2016 in Amsterdam, The Netherlands.
2015/10/07: Accepted to ICCV 2015 Workshop: TASK-CV
Our paper "Anatomical landmark detection in medical applications driven by synthetic data" has been accepted at the IEEE International Conference on Computer Vision 2015 workshop on transferring and adapting source knowledge in computer vision.
2015/09/14: Camera calibration code online
The camera calibration toolbox accompanying our paper "Learning Depth Calibration of Time-of-Flight Cameras" is available here.
2015/09/07: Accepted to ICCV 2015
Our papers "Variational Depth Superresolution using Example-Based Edge Representations" and "Conditioned Regression Models for Non-Blind Single Image Super-Resolution" have been accepted at the IEEE International Conference on Computer Vision 2015, December 13-16, Santiago, Chile.
2015/07/03: Accepted to BMVC 2015
Our papers "Depth Restoration via Joint Training of a Global Regression Model and CNNs" and "Learning Depth Calibration of Time-of-Flight Cameras" have been accepted as a poster presentation at the 26th British Machine Vision Conference, September 7-10, Swansea, United Kingdom.