
Hough-based Tracking of Non-Rigid Objects
Abstract
Online learning has shown to be a successful approach for tracking of previously unknown objects. The major limitation, however, is that most approaches are limited to a bounding-box representation with fixed aspect ratio. Thus, they provide a less accurate foreground/background separation, and cannot handel highly non-rigid and articulated objects. In this paper, we present a novel tracking-by-detection approach overcoming these limitations based on the Generalized Hough-Transform. We extend the idea of Hough-Forests to the online domain and couple the center vote based detection and back-projection with a rough segmentation based on graph-cuts. This significantly reduces the amount of noisy training samples during online learning and effectively prevents the tracker from drifting. We demonstrate that our method successfully tracks various previously unknown objects, even under heavy non-rigid transformations, partial occlusions, scale changes and rotations. Moreover, we compare our tracker to state-of-the-art methods (both bounding-box based as well as part-based) and show robust and accurate tracking results on various challenging sequences. This work has been supported by the Austrian FFG project MobiTrick (8258408) under the FIT-IT program.
Tracking Loop
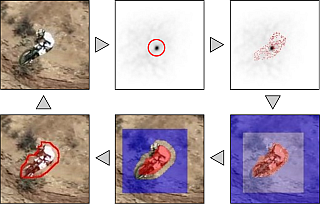
The tracking loop depicts the different stages of our tracking approach (starting from top-left):- A new image is fetched from the input stream
- The hough-based classifier is applied and establishs a voting map.
- The maximum of the voting map is detected as the new object position.
- We detect the support of our object position and mark these positions as foreground.
- We apply grab-cut segmentation to separate the object from the background on a per-pixel level
- The segmentation result is used to update the classifier during runtime
- The tracking result is marked in the image
 See also: Approach (avi).
See also: Approach (avi).
Code & Dataset
Code: HoughTrack1.0 (zip). Collection of the used Sequences: Part 1, Part 2, Part 3, Part 4, Part 5Sample videos
Supplemental Material: Tracking (avi). Poster Video: Poster Video (mp4).Related Publications
Hough-based Tracking of Non-rigid Objects (bib)Martin Godec, Peter M. Roth, and Horst Bischof
In Proc. International Conference on Computer Vision (ICCV), 2011