
LAB ENVIRONMENT (Deskotheque)
Introduction
The lab environment of the ICG is located at the so called "Deskotheque", whereas an overview is shown in Fig. 1. Besides of serving as an indoor MAV flight arena (droneSpace), the lab is utilized for various other research projects and lectures. The lab is located at the Inffeldgasse 25e building, whereas a floorplan can be found here.

Fig. 1: Panoramic image of the Lab Environment in the Deskotheque. The metal structure below the ceiling holds the Flex 13 cameras of the motion capture system.
Tracked Indoor Space
One important measuring device inside the lab environment is a motion capture system from OptiTrack (Flex 13) which enables a tracked space with the current dimensions of about 8x8x2m (LxWxH). The current setup of the motion capturing system includes 20 Flex 13 cameras, connected to a tracking server via USB. The tracking server is runing the Motive Tracker Software and also responsible for calculationg 6DOF poses of multiple tracked objects. Tracking accuracy for translation is typically in a sub-mm range and for rotations below 0.1°. Objects can be tracked with up to 120Hz, whereas multiple streaming interfaces (and according APIs) exist to forward tracking information to client applications (NatNet, VRPN, aso.).
Hardware Setup
The motion capture system consists of the following hardware components:
- 1x Tracking Server (Desktop PC, i7@3500MHz, 16GB RAM with 2x USB 3.0 PCI-Extension Cards)
- 20x "Flex 13" Cameras (FOV VxH 42°x56°) - Comment: 4x Flex 13 Cameras from EV!
- 20x "USB Camera Cable - Down Angle" - USB 2.0 Cables (4.9m, Connecting the Flex 13 Cameras to the Hubs) - Comment: 4x Cables from EV!
- 4x "OptiHub 2" USB 2.0 Hubs including the power supplies rated at 12V/4A (Connecting up to 6 Flex 13 Cameras to the Tracking Server) - Comment: 2x Hubs and power supplies from EV!
- 4x "USB Uplink Cable" - Optihub 2 USB 2.0 Connection Cables (4.9m, Connecting the Hub to the Tracking Server) - Comment: 2x Cables from EV!
- 4x "USB Active Extension Cable" - Optihub 2 USB 2.0 Extension Cables (4.9m, Extending the Optihub Connection Cables)
- 4x "Sync Cable" - Optihub 2 Sync Cables (9.3m, Syncing the tracking between the Hubs, SYNC OUT of Hub A goes to SYNC IN of Hub B aso., no closed loop necessary!)
- Nx IR Reflective Markers attached to rigid bodies (Diameter 19mm)
- 1x Calibration Wand (500mm)
An overview of the connections between the hardware components can be found in the official documentation for "Cabling and Wiring". A specific overview of the current hardware setup is shown in Fig. 2.
Camera Placement
The camera placement of the current setup involves 20 Flex 13 cameras, whereas for a robust tracking it is required that the FOV of at least 3 cameras overlaps! The baseline is arbitrary but should not be below 1m. For calculation of the tracked volume, the Motive Software provides its own application to visualize an estimate. Mentionable is that all cameras have a ROLL angle of 0°, are pitched downwards with a constant angle of FOVV/2+15° and are setup with a YAW angle turning the camera inwards the tracking volume with approx. FOVH/2. The current setup allows for tracking of rigid bodies up to 2.0m height and also aims for coverage of the rooms borders. If increased height of the tracking volume is needed, the PITCH can be adjusted as necessary at the cost of less tracking coverage at the boundaries of the room. An overview of the current camera placement and hardware setup is depicted in Fig. 2.
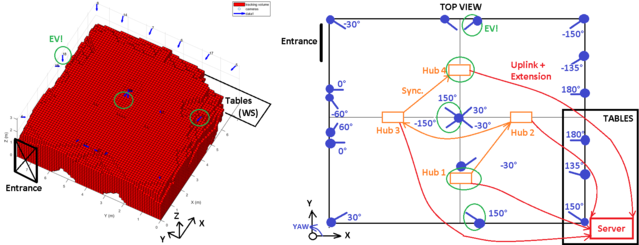
Fig. 2: (left) Overview of the tracked volume represented by red voxels. (right) Current camera placement shown from a top view.
Important Notes
USB Interface: In general, the USB interfaces have to be treated with care. First of all, the tracking server needs to provide enough USB bandwidth to handle the data incoming from the Optihubs. A recommended setup involves USB 3.0 PCI Express extension Cards for each Hub. In addition, the maximum amount of Hubs and Cameras is 4 and 24 (6 cameras connected to each Hub)!
Power Supplies: The power supplies of each OptiHub 2 might break after couple of years. 2 power supplies (from ICG) were renewed in 2018. Indicators are that a full group of Flex 13 cameras are not shown in the Motive Software and the according Optihub 2 is not booting properly (constantly blinking red, no blue or green LEDs visible).
Calibration: The calibration wand has to be setup properly in the Motive Software (be careful with size here, currently a 500mm Wand is used!). No "ghost markers" should be visible in the IR image of the Flex 13 cameras and sunlight should be avoided in general (keep the labs jalousies closed if possible!). An example video for calibration of a similiar setup can be found here! Be careful with the overall wand error. Besides of being "exceptional", it should be below 0.150mm to achieve acceptable tracking performance. Higher calibration errors may be a result of a bad trajectory of the wand (covering the wand too much, not enough samples for each camera).
- Introduction
- Tracked Indoor Space
- Hardware Setup
- Camera Placement
- Important Notes