
BB8: 3D Poses Estimator
 |  |  |  |
|---|
About BB8
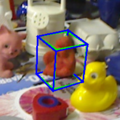
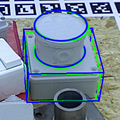
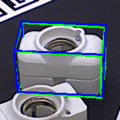
BB8 is a novel method for 3D object detection and pose estimation from color images only. It predicts the 3D poses of the objects in the form of 2D projections of the 8 corners of their 3D bounding boxes. The full approach is also scalable, as a single network can be trained for multiple objects simultaneously. This work was supported by the Christian Doppler Laboratory for Semantic 3D Computer Vision, funded in part by Qualcomm Inc.

BB8 on Mobile Devince
Our 3D object pose estimation method runs on a mobile device using only color images in real time.
| Sequence | Brachmann et al. | Ours |
|---|---|---|
| Ape | 85.2 | 96.6 |
| Bench Vise | 67.9 | 90.1 |
| Camera | 58.7 | 86.0 |
| Can | 70.8 | 91.2 |
| Cat | 84.2 | 98.8 |
| Driller | 73.9 | 80.9 |
| Duck | 73.1 | 92.2 |
| Egg Box | 83.1 | 91.0 |
| Glue | 74.2 | 92.3 |
| Hole Puncher | 78.9 | 95.3 |
| Iron | 83.6 | 84.8 |
| Lamp | 64.0 | 75.8 |
| Phone | 60.6 | 85.3 |
| Average | 73.7 | 89.3 |
Contact