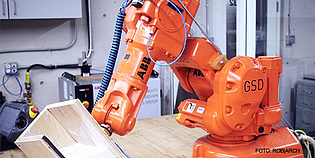
Robot Type: 3 x ABB IRB 140
Robot Controller: IRC 5, Robotware 5.14
Payload: 6 kg each
Special Equipment: Custom End Effectors, Mill
Software: ABB RobotStudio, Rhino, Grasshopper with custom components
Institution: Graduate School of Design, GSD Harvard University, Design Robotics Group