Facility
The processing robot facility at TU Graz was conceived cooperatively by the Faculty of Architecture and the Faculty of Civil engineering and is run by the Institute of Structural Design (ITE) and the Laboratory for Structural Engineering. The main manufacturing techniques in use are 3D concrete printing, grinding and milling. Since January 2020, a welding robot facility is part of the laboratory too.
Hardware Industrial Robot with Linear Axis
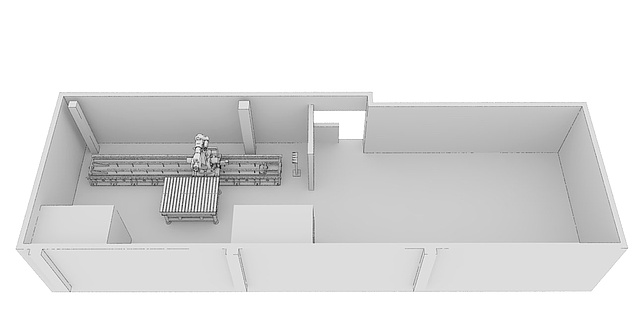
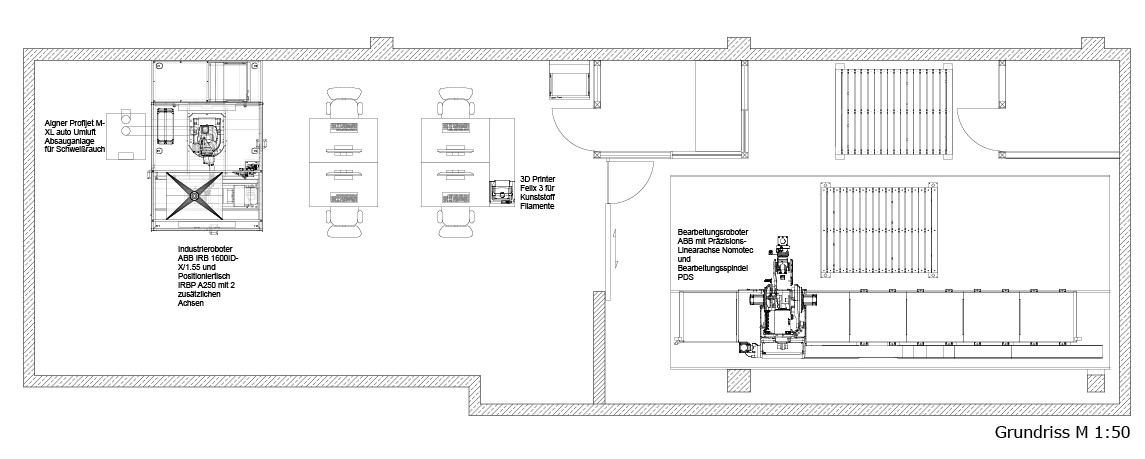
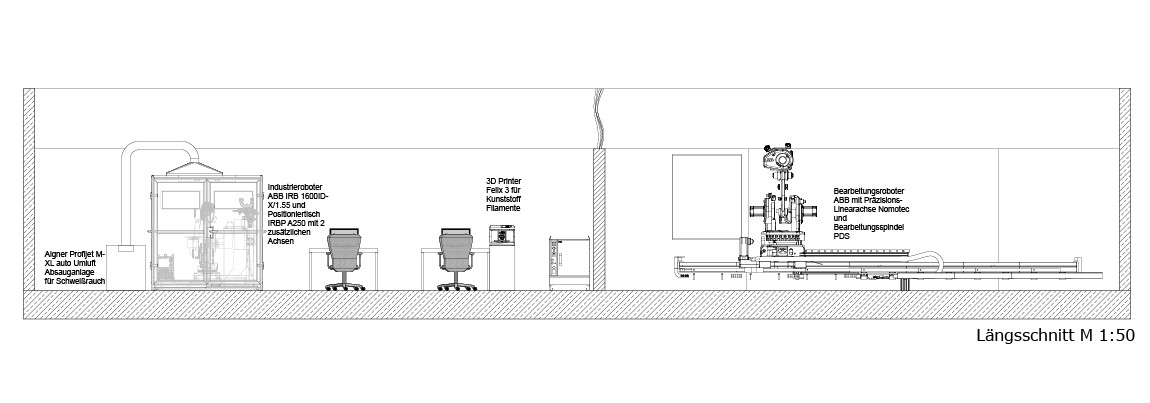
The research and experiment facility was installed by ABB AG Austria and is designed for dealing with large scale components. The facility can be used for wet or dry processing. Both hard and soft materials can be ground or milled. In addition to subtractive manufacturing, additive manufacturing with concrete is also possible in the laboratory.
The individual components of the facility are:
| Pre-machining robot | ABB NOMOTEC BaumitPDS |
The facility also has an automatic tool changing system and the force control module ‚Force Control. The processing facility is also equipped with an efficient air filtering system.
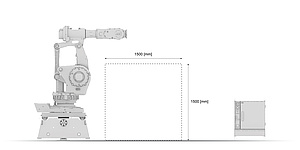
Depending on the materials, tools and the geometry of the component, a processing accuracy of +/- 0.2 [mm] in a processing area of 6000 x 1200 x 1200 [mm] can be achieved.

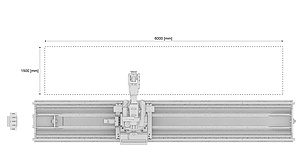
In contrast to most of the other existing facilities, the facility presented here is equipped with a high-precision linear axis which was designed and built by Nomotec. With a dead load of 7,0t, a payload of max 2,2t and a length of 7400mm, this axis enables the robot to process along a length of 6000mm.
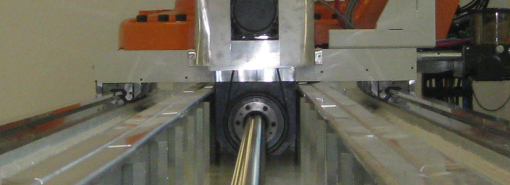
The movable base plate the robot is fixed onto has a weight of 800 kilos. This base is mounted onto linear ball-bearing guides and can be processed with an ø 70 mm ball screw.
Hardeware 3D Concrete Printing System
3D printing with concrete represents a significant innovation boost in the construction sector and has become a symbol for the digitalization of the construction industry in recent years. The construction process, which can be automated to a large extent, can dispense with costly mold construction and enables the targeted and economical processing of small quantities of concrete. Researchers and students now have the opportunity to apply the new technology in research projects or courses at the Institute of Structural Design in the Robotics Design Laboratory.
The concrete printing system is a 2-component system in which the Baumit printing mortar (Printcrete230) is mixed with an accelerator in the nozzle and can be layered in a dimensionally stable manner on a printing substrate by means of an extrusion process. The printing system consists of the following machine components: Print nozzle, PLC, hydraulic unit, accelerator pump and mortar mixing pump.

Hardware Welding Robot
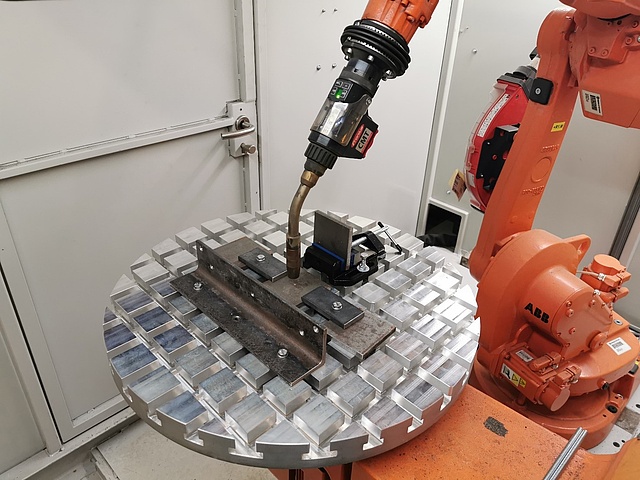
In the Robotic Design Lab we use an industrial robot IRB 1600ID-X/1.55 from ABB. The ID in the name stands for "Integrated Design" and means that all cables, wires and hoses are routed inside the upper arm, i.e. along the longitudinal axis of the robot. This makes this robot ideal for the intended application of arc welding, as all the necessary operating materials, power, welding wire and shielding gas, are guided in the axially guided hose package. This brings many advantages in handling and everyday use. The service life of all centrally guided elements is significantly increased by the reduced movement and vibration, and the greater distance from the arc means that the components are optimally protected from heat and weld spatter.
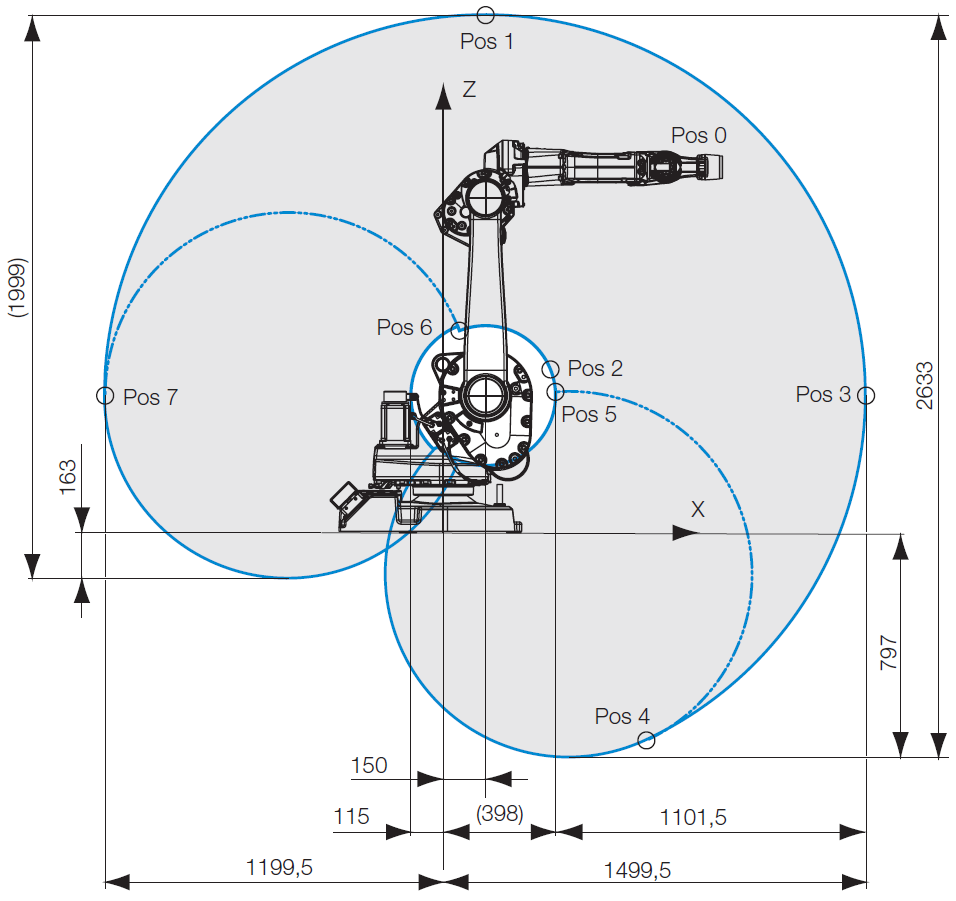
The reach of the robot is nominally 1.55 meters with a maximum payload of 4 kg. The robot has six manipulator axes, which provide the greatest possible freedom in torch positioning.

The robot is supplemented by an IRBP A250 positioning table with two additional axes, which generate additional degrees of freedom in the generation of geometries. The maximum manipulation weight of the positioning table is 250 kg. The positioning table is used to bring the workpiece into the optimum process position.
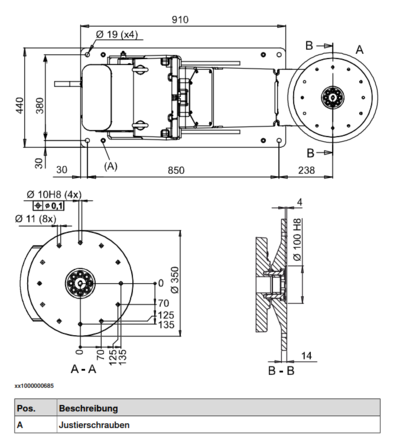
The positioning table was equipped with a custom-made clamping plate made of aluminum EnAw6082 (AlMg3) with a thermal conductivity of 170-220 W/mK. By acquiring this T-slot plate, the dwell times between the layers could be significantly reduced, as the heat flow, i.e. the outflow of heat from the component into the clamping plate, was improved.
The mobile welding fume filter Profijet M-XL auto with welding fume filter and filter cartridges from Aigner is used to extract and filter welding fumes. It is equipped with two filter cartridges made of polyester needle felt, a dust collection drawer, and an automatic compressed air filter cleaning system.
Software
| HyperMILL / HyperCADHyperMILL | |
PiPath
| |
| Rhinoceros 3D | |
| Grasshopper | |
| HAL Robotics | |
| Fire - FTP | |
Robot Studio RobotStudio basiert auf dem VirtualController von ABB, einer exakten Kopie der realen Robotersteuerung. Auf diese Weise sind realistische Simulationen möglich, in denen echte Roboterprogramme und Konfigurationen zum Einsatz kommen, die exakt den in der Produktion eingesetzten Daten entsprechen. Über die Bedieneroberfläche des RobotStudio (RobotWare) werden auch bei der NC-Programmierung für das System zusätzliche notwendige Informationen erstellt und editiert (Werkzeugdaten / Werkobjekte). |
|
Robotics Design Laboratory
Inffeldgasse 24 (Nordeingang) 8010 Graz
groundfloor roomnumber: BT244B
Contact person: Andreas Trummer