
Our main research question and objective in this project is: How can evidence-based medical knowledge, cognitive-psychological mechanisms, and novel interactive data visualizations be combined to form adaptive and interactive consumer health information systems that take account of individual health information needs, and increase health literacy by providing a reliable source of medical knowledge?
The Institute of Computer Graphics and Knowledge Visualization (TU Graz, Coordinator), the Institute of General Practice and Evidence-based Health Services Research (Medical University of Graz), and the Institute of Psychology (University of Graz) cooperate in this FWF Research Group, together with a renowned advisory board and international collaboration partners.
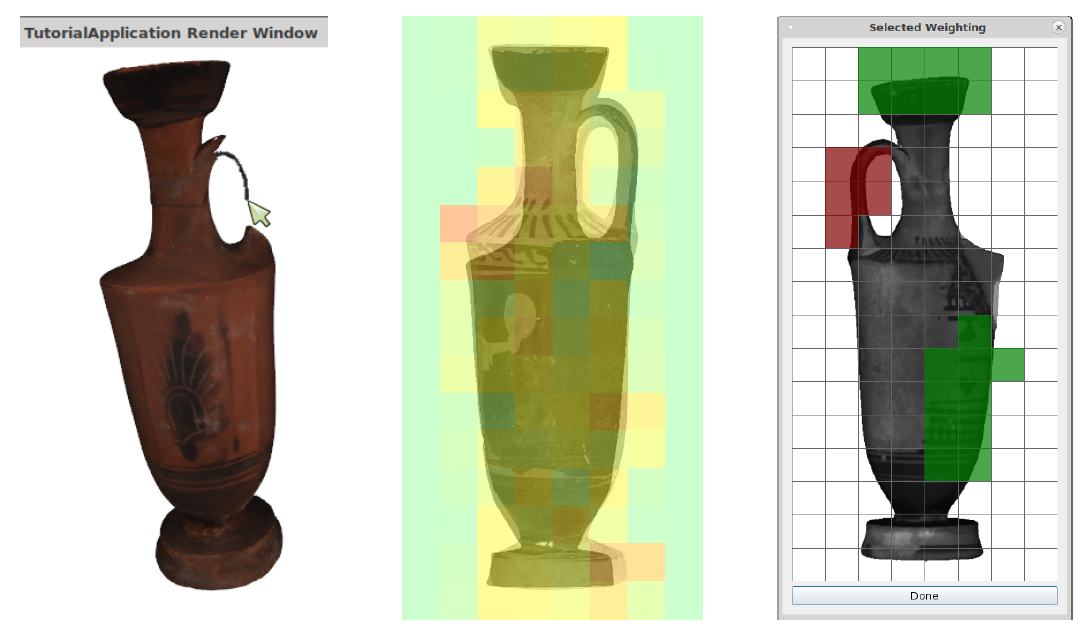
In this FWF project, we research new methods for searching, comparing, and visually exploring 3D cultural heritage objects based on appropriately specified user searches. Specifically, we want to develop and evaluate new methods for cross-modal search.
Virtual Reality for Cognitive Products and Production Systems
The goal of this research project is to improve development, production and operation of complex production and test systems by early integration of Virtual Reality (VR) technology. We focus on the improvement of the design quality by enhanced cross-team collaboration methods, and on improvement of production efficiency by VR-based training of technicians for new production lines. The research goals include, among others, devising a framework for efficient prototyping of VR-based applications reusing large 3D CAD object data from corporate databases, the visual analysis of performance data from training processes, as well as devising collaborative and distributed design review applications. The complementary VR4CPPS consortium consists of AVL List GmbH as industry partner, and Fraunhofer Austria as well as the TU Graz Institute of Computer Graphics and Knowledge Visualization as scientific partners. VR4CPPS is funded by the FFG within the initiative FTI Production of the Future.










