
Soft Robotic Medical Devices and Implants
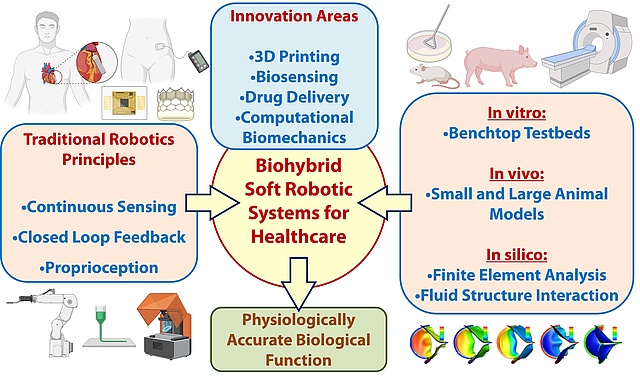
Unsere interdisziplinäre Forschungsgruppe widmet sich dem bislang ungedeckten Bedarf an hochpräzisen Plattformen für die Entwicklung und Erprobung medizinischer Geräte. Diese Vision realisieren wir, indem wir Prinzipien der klassischen Robotik – wie kontinuierliche Sensorik und rückgekoppelte Regelmechanismen – mit bioinspirierten Ansätzen der Soft Robotik kombinieren. Ziel ist es, physiologisch realitätsnahe biologische Funktionen nachzubilden. Dabei integrieren wir in vitro, in vivo und in silico Ansätze und greifen auf unsere Erfahrung in den Bereichen Soft Robotik, 3D-Druck, Biosensorik, Tiermodelle, rechnergestützte Biomechanik und Arzneimittelverabreichung zurück.
Warum Soft Robotik?
Im Gegensatz zu Robotern mit starren Körpern aus Metall, Keramik oder Hartplastik bestehen weiche Roboter aus nachgiebigen und flexiblen Materialien. Dadurch sind sie von Natur aus sicherer im direkten Kontakt mit dem Menschen. Das schnell wachsende Forschungsfeld der Soft Robotik bietet ideale Voraussetzungen für die Entwicklung implantierbarer Geräte und biomimetischer Simulationsplattformen, da die verwendeten Materialien mechanische Eigenschaften aufweisen, die denen von biologischem Gewebe ähneln.
Soft robotische Aktuatoren eignen sich zudem hervorragend zur Nachbildung der mechanischen Eigenschaften dynamischer Organsysteme wie Herz, Lunge und Zwerchfell oder auch der Peristaltik in der Speiseröhre – um nur einige Beispiele zu nennen. Solche Geräte erweitern die Grenzen traditioneller Robotik und ermöglichen Aufgaben, die mit klassischen starren Systemen nicht realisierbar sind.
Unsere aktuellen Arbeiten nutzen softrobotische Technologien zur Entwicklung sowohl von Labormodellen als auch in vivo-Modellen kardiovaskulärer Erkrankungen. Darüber hinaus haben wir neuartige, implantierbare Soft Roboter für die Medikamentenabgabe entwickelt – mit potenziellen Anwendungen in der Behandlung von Typ-1-Diabetes. Diese Plattformen ermöglichen die Simulation von Krankheitsverläufen und bieten damit die Grundlage für präzisere und personalisierte Behandlungsstrategien.
Unser Ansatz verbindet ingenieurwissenschaftlich entwickelte Materialien mit biologischen Signalen und überbrückt so die Lücke zwischen mechanischen Systemen und lebendem Gewebe. Damit entsteht eine Schnittstelle zwischen Robotik, biomedizinischer Technik und computergestützter Modellierung – mit dem Ziel, die Interaktion zwischen Maschinen und menschlichem Körper grundlegend neu zu definieren und damit den Weg für medizinische Therapien der nächsten Generation zu ebnen.
Nähere Informationen: https://www.dgoswami.org/
Mitarbeiter*innen
Ass.Prof. BEng PhD
BSc
|
Debkalpa Goswami
|
 |
| debkalpa.goswami@tugraz.at | |
|
https://www.linkedin.com/in/debkalpagoswami/?originalSubdomain=at |
|