
LaneS
LaneS - FCD based generation of lane-specific road-maps, user potential for ITS-service and maintenance
Keywords: FCD, road-maps, ITS-services
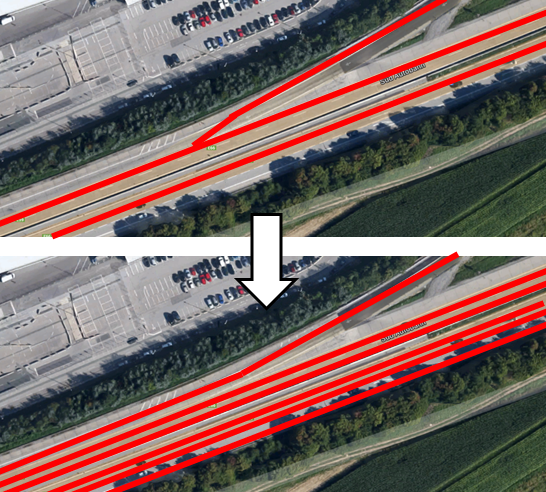
The project LaneS aims to develop methods and prototypes for semi-automatic determination of lane-specific road-maps on the basis of floating car data. In this context first prototypes shall be realized and validated with the focus on modelling of the corresponding network-graph. Furthermore new fields of applications for lane-specific maps in public institutions, road authorities and automotive industry shall be stimulated. The innovative domain of cooperative services and toll collection represents promising market potential, which shall be evaluated throughout the project. The generated network-graph in LaneS consisting of nodes and edges, will contain lane-refined elements, which will be referenced towards existing maps (e.g. GIP or commercial maps or OSM). In this regard, LaneS provides an extension to the digital maps, which can act as enabling technology for ITS services.
Duration: February 2015 - July 2016