Posterior Cramér-Rao Bounds on Localization and Mapping Errors in Distributed MIMO SLAM
04.11.2025
Last week, we presented our paper "Posterior Cramér–Rao Bounds on Localization and Mapping Errors in Distributed MIMO SLAM" [1] at the #Asilomar Conference. The paper introduces the mapping error bound (MEB)—a lower bound that quantifies how accurately specular surfaces can be estimated in radio-frequency (RF) simultaneous localization and mapping (SLAM). The bound covers single- and double-bounce multipath components and distributed anchors, and we show a state-of-the-art RF-SLAM algorithm [2] asymptotically approaches this bound.
In positioning, map information improves user localization. In communications, map information provides a geometric representation of the multipath channel, enabling the prediction and tracking of channel state information. The bounds presented in our paper enable benchmarking of the performance of SLAM algorithms that jointly estimate the user position and the environment map.
Contact: LinkedIn
Fast and Principled Learning for Sparse Signal Recovery
13.10.2025
From wireless communication networks to medical imaging and radar systems, many modern technologies depend on the ability to detect just a few meaningful signals buried in massive amounts of data. This task — known as sparse signal recovery — is essential for making sense of complex measurements, but existing algorithms can be painfully slow, especially when the signals come in naturally grouped patterns, known as block sparsity.
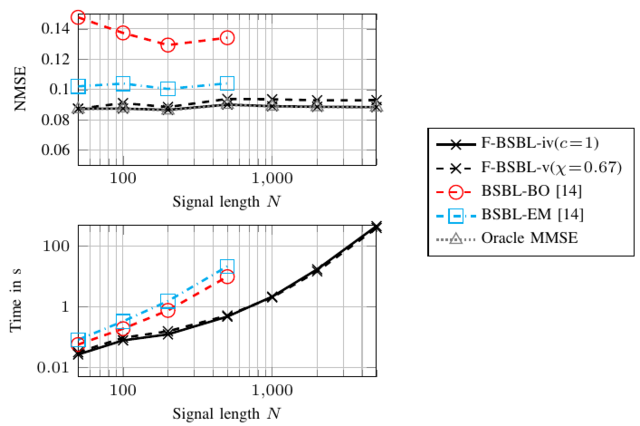
In our recent work [1], we developed a new algorithm called Fast Variational Block-Sparse Bayesian Learning (F-BSBL) that makes this process dramatically faster and more efficient. By rethinking how uncertainty and structure are handled in sparse models, we achieved up to a hundredfold speedup over existing approaches — without sacrificing accuracy. Our method also unifies several previously separate learning strategies into a single, elegant mathematical framework. Tested on challenging problems such as direction-of-arrival estimation, F-BSBL delivers both speed and precision, paving the way for real-time signal analysis in next-generation communication, sensing, and data-driven technologies.
- J. Möderl, E. Leitinger, B. H. Fleury, F. Pernkopf and K. Witrisal, "Fast Variational Block-Sparse Bayesian Learning," in IEEE Transactions on Signal Processing, doi: 10.1109/TSP.2025.3611234
Contact:
Jakob Möderl
Adaptive Multipath-Based SLAM for Distributed MIMO Systems
30.06.2025
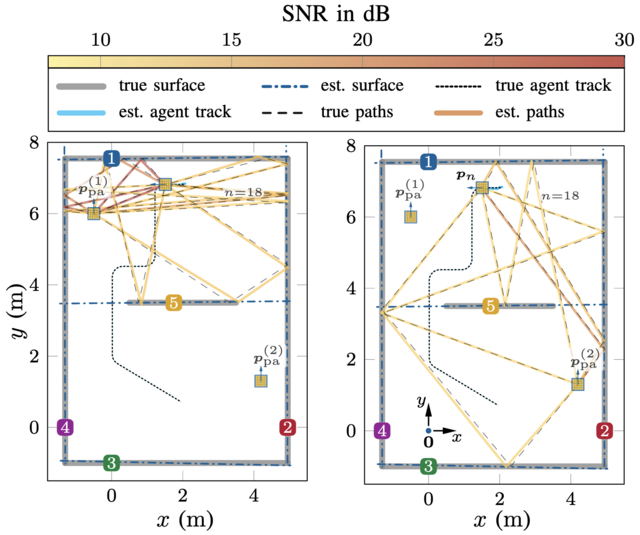
Localizing users and mapping the environment using radio signals is a key task in emerging applications such as reliable, low-latency communications, location-aware security, and safety-critical navigation. Recently introduced multipath-based simultaneous localization and mapping (MP-SLAM) can jointly localize a mobile agent (i.e., the user) and the reflective surfaces (such as walls) in radio frequency (RF) environments with convex geometries. Most existing MP-SLAM methods assume that map features and their corresponding RF propagation paths are statistically independent. These existing methods neglect inherent dependencies that arise when a single reflective surface contributes to different propagation paths or when an agent communicates with more than one base station (BS).
In our paper [1], we propose a Bayesian MP-SLAM method for distributed MIMO systems that addresses this limitation. In particular, we make use of amplitude statistics to establish adaptive time-varying detection probabilities. Based on the resulting “soft” ray-tracing strategy, our method can fuse information across propagation paths in RF environments with nonconvex geometries. A Bayesian estimation method for the joint estimation of map features and agent position is established. Our method is validated using synthetic RF measurements in a challenging scenario with nonconvex geometry and capable of early detection of new surfaces solely through double-bounce paths. Our algorithm provides accurate localization and mapping estimates and attains the posterior Cramér-Rao lower bound (PCRLB) [2].
[1] Xuhong Li, Benjamin Deutschmann, Erik Leitinger, and Florian Meyer, “Adaptive Multipath-Based SLAM for Distributed MIMO Systems,” unpublished, submitted for publication to IEEE Trans. Wireless Commun. [Online]. Available: https://arxiv.org/abs/2506.21798
[2] Benjamin Deutschmann, Xuhong Li, Florian Meyer, and Erik Leitinger, “Posterior Cramér-Rao Bounds on Localization and Mapping Errors in Distributed MIMO SLAM,” unpublished, submitted for publication to Asilomar-25, [Online]. Available: https://arxiv.org/abs/2506.19957
Contact: Erik Leitinger
LinkedIn
- [New Media Release] of our lab about our research within the AMBIENT-6G Horizon Europe on national television! (20.03.2026)
- [New Press-Release] about the renovation of our space hotspot at Graz University of Technology. (04.03.2026)
- [New publication] Jakob Möderl just published his journal article "General Pruning Criteria for Fast SBL" in the IEEE Signal Processing Letters. (13.11.2025)
- Congratulations to our intern Solvaig Berger-Joham for being selected as one of Austria’s Space Ambassadors to participate in the Parabolic Flight Campaign! (15.10.2025)
- [New publication] Jakob Möderl just published his journal article "Fast Variational Block-Sparse Bayesian Learning" in the IEEE Transactions on Signal Processing. (29.09.2025)
- [Thesis Event] Upcoming Thesis Event 2025 on October 1st for interested students!
- [New Press Release] about our project AMBIENT-6G Horizon Europe was published yesterday, concerning our planned work on backscatter communication and wireless power transfer! (28.08.2025)
- Gratulations to Alexander Venus! He was awarded with the "Josef Krainer Förderungspreis 2025". (18.03.2025)
- [New project] Participation in AMBIENT-6G Horizon Europe, a new European research project addressing the IoT's e-waste problem. (27.02.2025)
- IKS lab members contributed to an ESA field campaign to test satellite-to-drone communication as part of the UAV-3S project. Read more here. (27.01.2025)
- [New publication] Benjamin Deutschmann, Thomas Wilding, Klaus Witrisal and Erik Leitinger contributed to the publication of the journal article "Joint Localization, Synchronization, and Mapping via Phase-Coherent Distributed Arrays," in the IEEE Journal of Selected Topics in Signal Processing. (23.01.2025)
- [New publication] Andreas Fuchs pulished his journal article "Wideband Cooperative Localization through Generalized Cross-Correlation" in IEEE Access. (07.01.2025)
- [New publication] Jakob Möderl just published his journal article "Variational Inference of Structured Line Spectra Exploiting Group-Sparsity" in the IEEE Transactions on Signal Processing. (07.11.2024)
- [New publication] Mate Toth just published his journal article "Variational Signal Separation for Automotive Radar Interference Mitigation" in the IEEE Transactions on Radar Systems. It is available as open access. (16.10.2024)
- Gratulations to Jakob Möderl for successfully defending his PhD thesis. (05.09.2024)
- The NXP Lab was opened with festivities at campus Inffeldgasse. (13.11.2023)
Institute of Communication Networks and Satellite Communications
Inffeldgasse 12, A-8010 Graz
Site Map
Tel.: +43 316 873-7441
Fax: +43 316 873-7941
iks@tugraz.at
www.iks.tugraz.at
Interested in doing a project at our lab?
Please take a look at open topics offered by members of our team!