Adaptive Multipath-Based SLAM for Distributed MIMO Systems
Localizing users and mapping the environment using radio signals is a key task in emerging applications such as reliable, low-latency communications, location-aware security, and safety-critical navigation. Recently introduced multipath-based simultaneous localization and mapping (MP-SLAM) can jointly localize a mobile agent (i.e., the user) and the reflective surfaces (such as walls) in radio frequency (RF) environments with convex geometries. Most existing MP-SLAM methods assume that map features and their corresponding RF propagation paths are statistically independent. These existing methods neglect inherent dependencies that arise when a single reflective surface contributes to different propagation paths or when an agent communicates with more than one base station (BS).
In our paper [1], we propose a Bayesian MP-SLAM method for distributed MIMO systems that addresses this limitation. In particular, we make use of amplitude statistics to establish adaptive time-varying detection probabilities. Based on the resulting “soft” ray-tracing strategy, our method can fuse information across propagation paths in RF environments with nonconvex geometries. A Bayesian estimation method for the joint estimation of map features and agent position is established. Our method is validated using synthetic RF measurements in a challenging scenario with nonconvex geometry and capable of early detection of new surfaces solely through double-bounce paths. Our algorithm provides accurate localization and mapping estimates and attains the posterior Cramér-Rao lower bound (PCRLB) [2].
[1] Xuhong Li, Benjamin Deutschmann, Erik Leitinger, and Florian Meyer, “Adaptive Multipath-Based SLAM for Distributed MIMO Systems,” unpublished, submitted for publication to IEEE Trans. Wireless Commun. [Online]. Available: https://arxiv.org/abs/2506.21798
[2] Benjamin Deutschmann, Xuhong Li, Florian Meyer, and Erik Leitinger, “Posterior Cramér-Rao Bounds on Localization and Mapping Errors in Distributed MIMO SLAM,” unpublished, submitted for publication to Asilomar-25, [Online]. Available: https://arxiv.org/abs/2506.19957
Contact: Erik Leitinger
LinkedIn
Multi-Sensor Fusion of Active and Passive Measurements for Extended Object Tracking
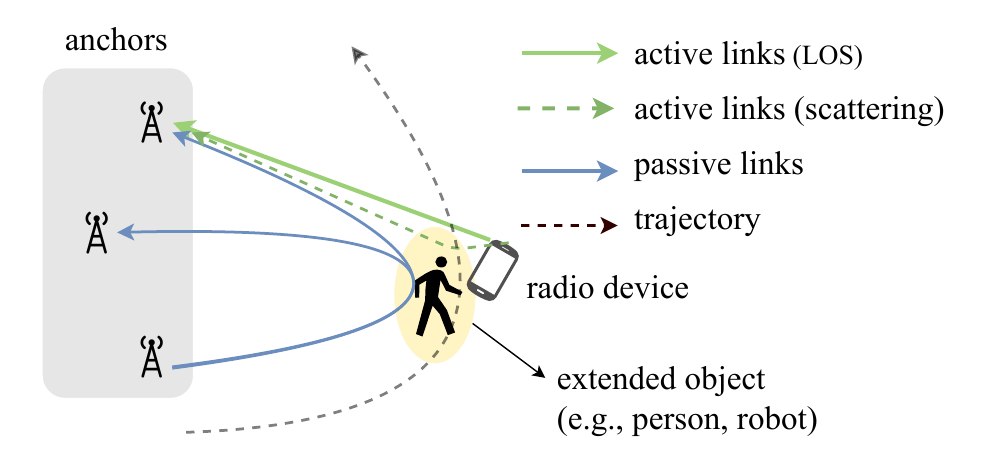
In many real-world scenarios - like when a person carries a radio device - direct line-of-sight (LoS) signals from surrounding anchors (e.g., base stations or sensors) can get blocked by the person's own body. This makes accurate positioning difficult, especially in challenging indoor or cluttered environments.
Our recent work tackles this problem by treating the person not just as an obstacle, but as a key part of the solution. We model the person as an extended object (EO) that can scatter and attenuate signals. Instead of relying only on LoS measurements, we combine:
- Active measurements between the device and fixed anchors
- Passive measurements between pairs of anchors that reflect off the person
We developed a Bayesian estimation framework and an extended object data association algorithm that can make sense of these complex, indirect signals.
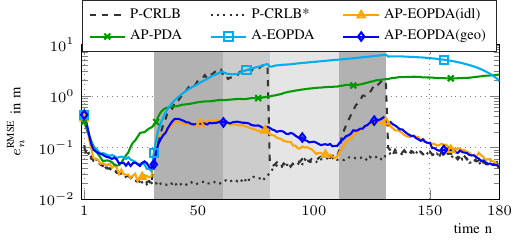
The result shows that the proposed joint estimation algorithm (AP-EOPDA) is much more reliable and accurate in positioning - even when the LoS is completely blocked [1].
This approach outperforms traditional methods that assume the point-target or rely solely on LoS signals. It opens the door to more robust and energy-efficient localization, especially in environments where unavailable LoS is common.
Feel free to reach out if you're working on related problems or want to know more about the technical details!
[1] Hong Zhu and Alexander Venus and Erik Leitinger and Klaus Witrisal, "Multi-Sensor Fusion of Active and Passive Measurements for Extended Object Tracking", in 33rd European Signal Processing Conference (EUSIPCO 2025), DOI:10.48550/arXiv.2504.18301.
Contact:
hong.zhu@tugraz.at
https://www.linkedin.com/in/hong-zhu-74173427a/
- Gratulations to Alexander Venus! He was awarded with the "Josef Krainer Förderungspreis 2025". (18.03.2025)
- [New project] Participation in AMBIENT-6G Horizon Europe, a new European research project addressing the IoT's e-waste problem. (27.02.2025)
- IKS lab members contributed to an ESA field campaign to test satellite-to-drone communication as part of the UAV-3S project. Read more here. (27.01.2025)
- [New publication] Benjamin Deutschmann, Thomas Wilding, Klaus Witrisal and Erik Leitinger contributed to the publication of the journal article "Joint Localization, Synchronization, and Mapping via Phase-Coherent Distributed Arrays," in the IEEE Journal of Selected Topics in Signal Processing. (23.01.2025)
- [New publication] Andreas Fuchs pulished his journal article "Wideband Cooperative Localization through Generalized Cross-Correlation" in IEEE Access. (07.01.2025)
- [New publication] Jakob Möderl just published his journal article "Variational Inference of Structured Line Spectra Exploiting Group-Sparsity" in the IEEE Transactions on Signal Processing. (07.11.2024)
- [New publication] Mate Toth just published his journal article "Variational Signal Separation for Automotive Radar Interference Mitigation" in the IEEE Transactions on Radar Systems. It is available as open access. (16.10.2024)
- Gratulations to Jakob Möderl for successfully defending his PhD thesis. (05.09.2024)
- The NXP Lab was opened with festivities at campus Inffeldgasse. (13.11.2023)
Institute of Communication Networks and Satellite Communications
Inffeldgasse 12, A-8010 Graz
Site Map
Tel.: +43 316 873-7441
Fax: +43 316 873-7941
iks@tugraz.at
www.iks.tugraz.at
Interested in doing a project at our lab?
Please take a look at open topics offered by members of our team!