
Roboter
Hardware
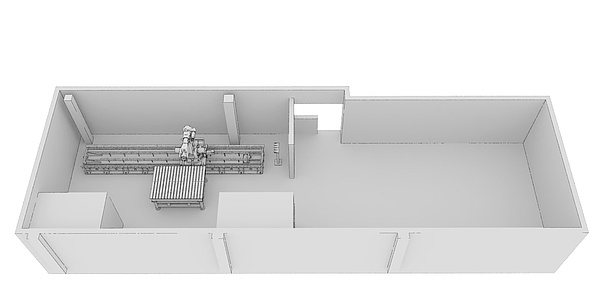
Die von ABB AG Österreich aufgebaute Forschungs- und Versuchsanlage ist für Nass- und Trockenbearbeitung von großen Bauteilen ausgelegt. Sowohl harte als auch weiche Materialien können durch Schleifen und Fräsen bearbeitet werden.
Die einzelnen Komponenten der Anlage sind:
| Bearbeitungsroboter | ABB |
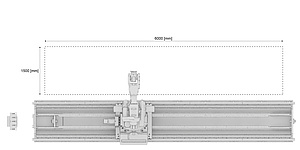
| Linearchse | NOMOTEC |
| Bearbeitungsspindeln | PDS |
Darüber hinaus verfügt die Anlage über ein automatisches Werkzeugwechsel-System als auch die Kraftsensorsteuerung „Force Control“. Weiters steht in der Bearbeitungszelle eine leistungsstarke Absauganlage zur Verfügung.
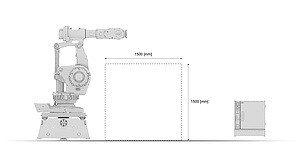
In Abhängigkeit von Werkstoff, Werkzeug und Werkstück-Geometrie sind Bearbeitungsgenauigkeiten kleiner +/- 0,2 [mm] im Bearbeitungsraum von 6000 x 1200 x 1200 [mm] erreichbar.

Zum Unterschied zu den meisten existierenden Anlagen ist die hier beschriebene Anlage mit einer Präzisions-Linearachse ausgestattet, welche von der Firma Nomotec geplant und gebaut wurde. Mit einem Eigengewicht von 7,0 t , einer maximal zulässigen Nutzlast von 2,2 t und einer Gesamstlänge von 7400 mm bietet sie die Möglichkeit den Roboter auf einer Länge von 6000 mm zu verfahren.
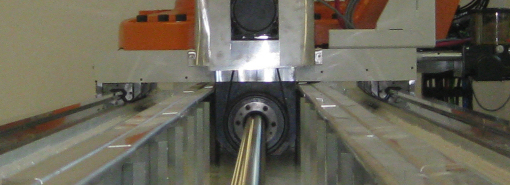
Die rund 800 Kilogramm schwere bewegte Basisplatte auf der der Bearbeitungsroboter montiert ist, ist mit Linear-Kugelführungen gelagert und wird über eine Kugelrollspindel ø 70 Millimeter angetrieben. Der Antrieb der Achse ist als siebente Achse in die Robotersteuerung implementiert.

Labor für Konstruktiven Ingenieurbau - LKI
Inffeldgasse 24
8010 Graz
Tel.: +43 (0) 316 / 873 - 7051
Fax: +43 (0) 316 / 873 7061
lki@tugraz.at
Neues Diplomarbeitsthema: