Multiple Target Detection and Tracking
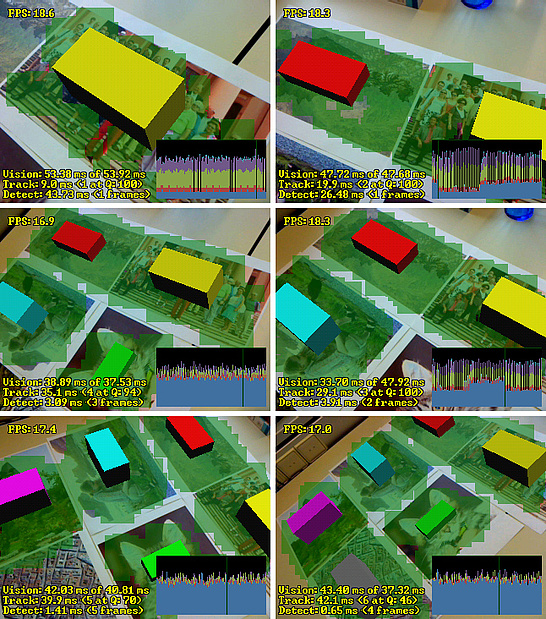
Our previous approaches achieved high frame rates by only doing detection or tracking, but not both at the same time. The detector requires about 30-50ms per frame on a mobile phone, while the tracker uses only 6-10ms per tracked object and frame. It is therefore not a problem to track at 30Hz or more, but once a target (object) has been detected and tracked no more targets can be detected without suffering overall frame rate.
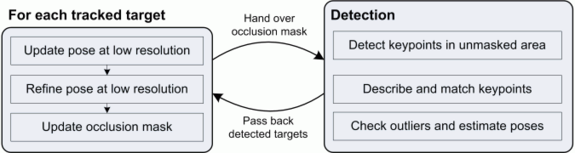
We therefore developed new techniques that allow tracking and detection to run simultanously at high frame rates. The following figure shows a high-level overview of our new approach: