
Incremental Tracking
Tracking at least temporarily from unknown environments is very desirable since users can usually not be constrained to always point the camera straight to markers and refrain from occluding tracking targets. We developed two computationally inexpensive approaches to support marker-based global localization with incremental tracking from untrained natural features. Both techniques have been run on cell phones at interactive frame rates, and can extend the usability of markers well beyond their original purpose: If markers are temporarily lost or occluded, the incremental tracking fills in the gap until a marker is reacquired.

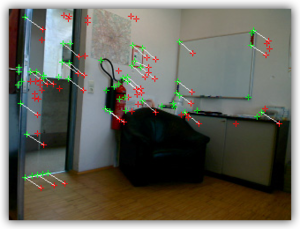 Incremental tracking of orientation with inertial sensors has been shown to be highly useful for AR applications to either improve tracking robustness, or as a fallback when no other tracking approach is available. While most of today's mobile phones do not have inertial sensors, their built-in camera can be used in a similar way using optical flow. Our pixel flow detector is intended for augmenting a panoramic view of the environment. A marker is used for initially determining the current global location and viewing direction. Then the user is free to turn around observing the augmentations, while remaining in the same location.
Incremental tracking of orientation with inertial sensors has been shown to be highly useful for AR applications to either improve tracking robustness, or as a fallback when no other tracking approach is available. While most of today's mobile phones do not have inertial sensors, their built-in camera can be used in a similar way using optical flow. Our pixel flow detector is intended for augmenting a panoramic view of the environment. A marker is used for initially determining the current global location and viewing direction. Then the user is free to turn around observing the augmentations, while remaining in the same location.